Evaluate the given Laplace transform.
i. L { t sinh 3 t } \mathcal{L}\{t \sinh 3 t\} L { t sinh 3 t }
ii. L { t e − 3 t cos 3 t } \mathcal{L}\left\{t e^{-3 t} \cos 3 t\right\} L { t e − 3 t cos 3 t }
iii. L { e 2 t ∗ sin t } \mathcal{L}\left\{e^{2 t} * \sin t\right\} L { e 2 t ∗ sin t }
iv. L { e − t ∗ e t cos t } \mathcal{L}\left\{e^{-t} * e^{t} \cos t\right\} L { e − t ∗ e t cos t }
v. L { ∫ 0 t τ sin τ d τ } \mathcal{L}\left\{\int_{0}^{t} \tau \sin \tau d \tau\right\} L { ∫ 0 t τ sin τ d τ }
vi. L { t ∫ 0 t sin τ d τ } \mathcal{L}\left\{t \int_{0}^{t} \sin \tau d \tau\right\} L { t ∫ 0 t sin τ d τ }
i.
L { t sinh 3 t } = − d d s ( 3 s 2 − 3 2 ) = 6 s ( s 2 − 9 ) 2 \begin{aligned}\mathcal{L}\{t \sinh 3 t\}&=-\frac{d}{d s}\left(\frac{3}{s^{2}-3^{2}}\right)\\&=\frac{6 s}{\left(s^{2}-9\right)^{2}}\end{aligned} L { t sinh 3 t } = − d s d ( s 2 − 3 2 3 ) = ( s 2 − 9 ) 2 6 s ii.
L { t e − 3 t cos 3 t } = − d d s ( s + 3 ( s + 3 ) 2 + 3 2 ) = − [ ( s + 3 ) 2 + 9 ] ( 1 ) − ( s + 3 ) 2 ( s + 3 ) [ ( s + 3 ) 2 + 9 ] 2 = − ( s + 3 ) 2 + 9 − 2 ( s + 3 ) 2 [ ( s + 3 ) 2 + 9 ] 2 = ( s + 3 ) 2 − 9 [ ( s + 3 ) 2 + 9 ] 2 \begin{aligned}
\mathcal{L}\left\{t e^{-3 t} \cos 3 t\right\} &=-\frac{d}{d s}\left(\frac{s+3}{(s+3)^{2}+3^{2}}\right) \\
&=-\frac{\left[(s+3)^{2}+9\right](1)-(s+3) 2(s+3)}{\left[(s+3)^{2}+9\right]^{2}} \\
&=-\frac{(s+3)^{2}+9-2(s+3)^{2}}{\left[(s+3)^{2}+9\right]^{2}} \\
&=\frac{(s+3)^{2}-9}{\left[(s+3)^{2}+9\right]^{2}}
\end{aligned} L { t e − 3 t cos 3 t } = − d s d ( ( s + 3 ) 2 + 3 2 s + 3 ) = − [ ( s + 3 ) 2 + 9 ] 2 [ ( s + 3 ) 2 + 9 ] ( 1 ) − ( s + 3 ) 2 ( s + 3 ) = − [ ( s + 3 ) 2 + 9 ] 2 ( s + 3 ) 2 + 9 − 2 ( s + 3 ) 2 = [ ( s + 3 ) 2 + 9 ] 2 ( s + 3 ) 2 − 9 iii.
L { e 2 t ∗ sin t } = 1 ( s − 2 ) ( s 2 + 1 ) \mathcal{L}\left\{e^{2 t} * \sin t\right\}=\frac{1}{(s-2)\left(s^{2}+1\right)} L { e 2 t ∗ sin t } = ( s − 2 ) ( s 2 + 1 ) 1 iv.
L { e − t ∗ e t cos t } = s − 1 ( s + 1 ) [ ( s − 1 ) 2 + 1 ] \mathcal{L}\left\{e^{-t} * e^{t} \cos t\right\}=\frac{s-1}{(s+1)\left[(s-1)^{2}+1\right]} L { e − t ∗ e t cos t } = ( s + 1 ) [ ( s − 1 ) 2 + 1 ] s − 1 v.
L { ∫ 0 t τ sin τ d τ } = 1 s L { t sin t } = 1 s ( − d d s ( 1 s 2 + 1 ) ) = − 1 s ( − 2 s ( s 2 + 1 ) 2 ) = 2 ( s 2 + 1 ) 2 \begin{aligned}
\mathcal{L}\left\{\int_{0}^{t} \tau \sin \tau d \tau\right\} &=\frac{1}{s} \mathcal{L}\{t \sin t\}=\frac{1}{s}\left(-\frac{d}{d s}\left(\frac{1}{s^{2}+1}\right)\right) \\
&=-\frac{1}{s}\left(-\frac{2 s}{\left(s^{2}+1\right)^{2}}\right) \\
&=\frac{2}{\left(s^{2}+1\right)^{2}}
\end{aligned} L { ∫ 0 t τ sin τ d τ } = s 1 L { t sin t } = s 1 ( − d s d ( s 2 + 1 1 ) ) = − s 1 ( − ( s 2 + 1 ) 2 2 s ) = ( s 2 + 1 ) 2 2 vi.
L { t ∫ 0 t sin τ d τ } = − d d s ( L { ∫ 0 t sin τ d τ } ) = − d d s ( 1 s 1 s 2 + 1 ) = − ( 1 s ( − 2 s ( s 2 + 1 ) 2 ) − 1 s 2 ( 1 s 2 + 1 ) ) = 3 s 2 + 1 s 2 ( s 2 + 1 ) 2 \begin{aligned}
\mathcal{L}\left\{t \int_{0}^{t} \sin \tau d \tau\right\} &=-\frac{d}{d s}\left(\mathcal{L}\left\{\int_{0}^{t} \sin \tau d \tau\right\}\right) \\
&=-\frac{d}{d s}\left(\frac{1}{s} \frac{1}{s^{2}+1}\right) \\
&=-\left(\frac{1}{s}\left(-\frac{2 s}{\left(s^{2}+1\right)^{2}}\right)-\frac{1}{s^{2}}\left(\frac{1}{s^{2}+1}\right)\right) \\
&=\frac{3 s^{2}+1}{s^{2}\left(s^{2}+1\right)^{2}}
\end{aligned} L { t ∫ 0 t sin τ d τ } = − d s d ( L { ∫ 0 t sin τ d τ } ) = − d s d ( s 1 s 2 + 1 1 ) = − ( s 1 ( − ( s 2 + 1 ) 2 2 s ) − s 2 1 ( s 2 + 1 1 ) ) = s 2 ( s 2 + 1 ) 2 3 s 2 + 1
Use the Laplace transform to solve the initial-value problem.
i. d y d t + 3 y = 13 sin 2 t , y ( 0 ) = 6 \frac{d y}{d t}+3 y=13 \sin 2 t, y(0)=6 d t d y + 3 y = 13 sin 2 t , y ( 0 ) = 6
ii. y ′ ′ + 16 y = f ( t ) , y ( 0 ) = 0 , y ′ ( 0 ) = 1 y^{\prime \prime}+16 y=f(t), y(0)=0, y^{\prime}(0)=1 y ′′ + 16 y = f ( t ) , y ( 0 ) = 0 , y ′ ( 0 ) = 1 f ( t ) = { cos 4 t , 0 ≤ t ≤ π 0 , t ≥ π f(t)=\left\{\begin{array}{cc}\cos 4 t, & 0 \leq t \leq \pi \\ 0, & t \geq \pi\end{array}\right. f ( t ) = { cos 4 t , 0 , 0 ≤ t ≤ π t ≥ π
iii. y ′ + y = δ ( t − 1 ) , y ( 0 ) = 2 y^{\prime}+y=\delta(t-1), y(0)=2 y ′ + y = δ ( t − 1 ) , y ( 0 ) = 2
iv. y ′ ′ − 7 y ′ + 6 y = e t + δ ( t − 2 ) + δ ( t − 4 ) , y ( 0 ) = 0 , y ′ ( 0 ) = 0 y^{\prime \prime}-7 y^{\prime}+6 y=e^{t}+\delta(t-2)+\delta(t-4), \quad y(0)=0, y^{\prime}(0)=0 y ′′ − 7 y ′ + 6 y = e t + δ ( t − 2 ) + δ ( t − 4 ) , y ( 0 ) = 0 , y ′ ( 0 ) = 0
v. y ′ ′ + y = δ ( t − 1 2 π ) + δ ( t − 3 2 π ) , y ( 0 ) = 0 , y ′ ( 0 ) = 0 y^{\prime \prime}+y=\delta\left(t-\frac{1}{2} \pi\right)+\delta\left(t-\frac{3}{2} \pi\right), \quad y(0)=0, \quad y^{\prime}(0)=0 y ′′ + y = δ ( t − 2 1 π ) + δ ( t − 2 3 π ) , y ( 0 ) = 0 , y ′ ( 0 ) = 0
i.
L ( d y d t ) + 3 L ( y ) = 13 L ( sin 2 t ) s Y ( s ) − y ( 0 ) + 3 Y ( s ) = 13 2 s 2 + 4 ( s + 3 ) Y ( s ) = 6 + 26 s 2 + 4 Y ( s ) = 6 s + 3 + 26 ( s + 3 ) ( s 2 + 4 ) Y ( s ) = 6 s 2 + 50 ( s + 3 ) ( s 2 + 4 ) \begin{aligned}
\mathcal{L}\left(\frac{d y}{d t}\right)+3 \mathcal{L}(y)&=13 \mathcal{L}(\sin 2 t) \\
s Y(s)-y(0)+3 Y(s)&=13 \frac{2}{s^{2}+4} \\
(s+3) Y(s)&=6+\frac{26}{s^{2}+4}\\Y(s)&=\frac{6}{s+3}+\frac{26}{(s+3)\left(s^{2}+4\right)}\\Y(s)&=\frac{6 s^{2}+50}{(s+3)\left(s^{2}+4\right)}
\end{aligned} L ( d t d y ) + 3 L ( y ) s Y ( s ) − y ( 0 ) + 3 Y ( s ) ( s + 3 ) Y ( s ) Y ( s ) Y ( s ) = 13 L ( sin 2 t ) = 13 s 2 + 4 2 = 6 + s 2 + 4 26 = s + 3 6 + ( s + 3 ) ( s 2 + 4 ) 26 = ( s + 3 ) ( s 2 + 4 ) 6 s 2 + 50 Let 6 s 2 + 50 ( s + 3 ) ( s 2 + 4 ) = A s + 3 + B s + C s 2 + 4 ⇒ A = 8 , B = − 2 , C = 6 \frac{6 s^{2}+50}{(s+3)\left(s^{2}+4\right)}=\frac{A}{s+3}+\frac{B s+C}{s^{2}+4} \quad \Rightarrow \quad A=8, \quad B=-2, \quad C=6 ( s + 3 ) ( s 2 + 4 ) 6 s 2 + 50 = s + 3 A + s 2 + 4 B s + C ⇒ A = 8 , B = − 2 , C = 6
Y ( s ) = 6 s 2 + 50 ( s + 3 ) ( s 2 + 4 ) = 8 s + 3 + 6 − 2 s s 2 + 4 \begin{aligned}Y(s)&=\frac{6 s^{2}+50}{(s+3)\left(s^{2}+4\right)}=\frac{8}{s+3}+\frac{6-2 s}{s^{2}+4} \\
\end{aligned} Y ( s ) = ( s + 3 ) ( s 2 + 4 ) 6 s 2 + 50 = s + 3 8 + s 2 + 4 6 − 2 s ∴ y ( t ) = L − 1 ( 8 s + 3 + 6 − 2 s s 2 + 4 ) = 8 e − 3 t + 3 sin 2 t − 2 cos 2 t \therefore y(t)=\mathcal{L}^{-1}\left(\frac{8}{s+3}+\frac{6-2 s}{s^{2}+4}\right)=8 e^{-3 t}+3 \sin 2 t-2 \cos 2 t ∴ y ( t ) = L − 1 ( s + 3 8 + s 2 + 4 6 − 2 s ) = 8 e − 3 t + 3 sin 2 t − 2 cos 2 t ii. The Laplace transform of the differential equation is
s 2 L { y } − s y ( 0 ) − y ′ ( 0 ) + 16 L { y } = L { cos 4 t u ( t ) − cos 4 t u ( t − π ) } s 2 L { y } − s ( 0 ) − 1 + 16 L { y } = s s 2 + 16 − s e − π s s 2 + 16 ( s 2 + 16 ) L { y } = 1 + s s 2 + 16 − s e − π s s 2 + 16 L { y } = 1 s 2 + 16 + s ( s 2 + 16 ) 2 − s e − π s ( s 2 + 16 ) 2 \begin{aligned}
s^{2} \mathcal{L}\{y\}-s y(0)-y^{\prime}(0)+16 \mathcal{L}\{y\}&=\mathcal{L}\{\cos 4 t u(t)-\cos 4 t u(t-\pi)\}\\s^{2} \mathcal{L}\{y\}-s(0)-1+16 \mathcal{L}\{y\}&=\frac{s}{s^{2}+16}-\frac{s e^{-\pi s}}{s^{2}+16}\\\left(s^{2}+16\right) \mathcal{L}\{y\}&=1+\frac{s}{s^{2}+16}-\frac{s e^{-\pi s}}{s^{2}+16}\\\mathcal{L}\{y\}&=\frac{1}{s^{2}+16}+\frac{s}{\left(s^{2}+16\right)^{2}}-\frac{s e^{-\pi s}}{\left(s^{2}+16\right)^{2}}
\end{aligned} s 2 L { y } − sy ( 0 ) − y ′ ( 0 ) + 16 L { y } s 2 L { y } − s ( 0 ) − 1 + 16 L { y } ( s 2 + 16 ) L { y } L { y } = L { cos 4 t u ( t ) − cos 4 t u ( t − π )} = s 2 + 16 s − s 2 + 16 s e − π s = 1 + s 2 + 16 s − s 2 + 16 s e − π s = s 2 + 16 1 + ( s 2 + 16 ) 2 s − ( s 2 + 16 ) 2 s e − π s y ( t ) = 1 4 sin 4 t + 1 8 t sin 4 t − 1 8 ( t − π ) sin 4 ( t − π ) u ( t − π ) y(t)=\frac{1}{4} \sin 4 t+\frac{1}{8} t \sin 4 t-\frac{1}{8}(t-\pi) \sin 4(t-\pi) u(t-\pi) y ( t ) = 4 1 sin 4 t + 8 1 t sin 4 t − 8 1 ( t − π ) sin 4 ( t − π ) u ( t − π ) iii. The Laplace transform of the differential equation is
s Y ( s ) − y ′ ( 0 ) + Y ( s ) = e − s ( s + 1 ) Y ( s ) = 2 + e − s Y ( s ) = 2 s + 1 + e − s s + 1 \begin{aligned}
s Y(s)-y^{\prime}(0)+Y(s)&=e^{-s} \\
(s+1) Y(s)&=2+e^{-s} \\
Y(s)&=\frac{2}{s+1}+\frac{e^{-s}}{s+1} \\
\end{aligned} s Y ( s ) − y ′ ( 0 ) + Y ( s ) ( s + 1 ) Y ( s ) Y ( s ) = e − s = 2 + e − s = s + 1 2 + s + 1 e − s y ( t ) = 2 e − t + e − ( t − 1 ) u ( t − 1 ) y(t)=2 e^{-t}+e^{-(t-1)} u(t-1) y ( t ) = 2 e − t + e − ( t − 1 ) u ( t − 1 ) iv. The Laplace transform of the differential equation is
s 2 Y ( s ) − s y ( 0 ) − y ′ ( 0 ) − 7 ( s Y ( s ) − y ( 0 ) ) + 6 Y ( s ) = 1 s − 1 + e − 2 s + e − 4 s ( s 2 − 7 s + 6 ) Y ( s ) = 1 s − 1 + e − 2 s + e − 4 s \begin{aligned}
s^{2} Y(s)-s y(0)-y^{\prime}(0)-7(s Y(s)-y(0))+6 Y(s)&=\frac{1}{s-1}+e^{-2 s}+e^{-4 s} \\
\left(s^{2}-7 s+6\right) Y(s)&=\frac{1}{s-1}+e^{-2 s}+e^{-4 s} \\
\end{aligned} s 2 Y ( s ) − sy ( 0 ) − y ′ ( 0 ) − 7 ( s Y ( s ) − y ( 0 )) + 6 Y ( s ) ( s 2 − 7 s + 6 ) Y ( s ) = s − 1 1 + e − 2 s + e − 4 s = s − 1 1 + e − 2 s + e − 4 s Y ( s ) = 1 ( s − 1 ) 2 ( s − 6 ) + e − 2 s ( s − 1 ) ( s − 6 ) + e − 4 s ( s − 1 ) ( s − 6 ) Y(s)=\frac{1}{(s-1)^{2}(s-6)}+\frac{e^{-2 s}}{(s-1)(s-6)}+\frac{e^{-4 s}}{(s-1)(s-6)} Y ( s ) = ( s − 1 ) 2 ( s − 6 ) 1 + ( s − 1 ) ( s − 6 ) e − 2 s + ( s − 1 ) ( s − 6 ) e − 4 s Let 1 ( s − 1 ) ( s − 6 ) = A s − 1 + B s − 6 ⇒ A = − 1 5 , B = 1 5 \frac{1}{(s-1)(s-6)}=\frac{A}{s-1}+\frac{B}{s-6} \Rightarrow \quad A=-\frac{1}{5}, B=\frac{1}{5} ( s − 1 ) ( s − 6 ) 1 = s − 1 A + s − 6 B ⇒ A = − 5 1 , B = 5 1
Let 1 ( s − 1 ) 2 ( s − 6 ) = C s − 1 + D ( s − 1 ) 2 + E s − 6 ⇒ C = − 1 25 , D = − 1 5 , E = 1 25 \frac{1}{(s-1)^{2}(s-6)}=\frac{C}{s-1}+\frac{D}{(s-1)^{2}}+\frac{E}{s-6} \quad \Rightarrow \quad C=-\frac{1}{25}, \quad D=-\frac{1}{5}, \quad E=\frac{1}{25} ( s − 1 ) 2 ( s − 6 ) 1 = s − 1 C + ( s − 1 ) 2 D + s − 6 E ⇒ C = − 25 1 , D = − 5 1 , E = 25 1
Y ( s ) = − 1 25 1 s − 1 − 1 5 1 ( s − 1 ) 2 + 1 25 1 s − 6 + ( − 1 5 1 s − 1 + 1 5 1 s − 6 ) ( e − 2 s + e − 4 s ) Y(s)=-\frac{1}{25} \frac{1}{s-1}-\frac{1}{5} \frac{1}{(s-1)^{2}}+\frac{1}{25} \frac{1}{s-6}+\left(-\frac{1}{5} \frac{1}{s-1}+\frac{1}{5} \frac{1}{s-6}\right)\left(e^{-2 s}+e^{-4 s}\right) Y ( s ) = − 25 1 s − 1 1 − 5 1 ( s − 1 ) 2 1 + 25 1 s − 6 1 + ( − 5 1 s − 1 1 + 5 1 s − 6 1 ) ( e − 2 s + e − 4 s ) f ( t ) = − 1 25 e t − 1 5 t e t + 1 25 e 6 t + ( − 1 5 e ( t − 2 ) + 1 5 e 6 ( t − 2 ) ) u ( t − 2 ) + ( − 1 5 e ( t − 4 ) + 1 5 e 6 ( t − 4 ) ) u ( t − 4 ) \begin{aligned}f(t)&=-\frac{1}{25} e^{t}-\frac{1}{5} t e^{t}+\frac{1}{25} e^{6 t}+\left(-\frac{1}{5} e^{(t-2)}+\frac{1}{5} e^{6(t-2)}\right) u(t-2)\\&\quad+\left(-\frac{1}{5} e^{(t-4)}+\right. \left.\frac{1}{5} e^{6(t-4)}\right) u(t-4)\end{aligned} f ( t ) = − 25 1 e t − 5 1 t e t + 25 1 e 6 t + ( − 5 1 e ( t − 2 ) + 5 1 e 6 ( t − 2 ) ) u ( t − 2 ) + ( − 5 1 e ( t − 4 ) + 5 1 e 6 ( t − 4 ) ) u ( t − 4 ) v.
s 2 Y ( s ) − s y ( 0 ) − y ′ ( 0 ) + Y ( s ) = e − π 2 s + e − 3 π 2 s ( s 2 + 1 ) Y ( s ) = e − π 2 s + e − 3 π 2 s Y ( s ) = e − π 2 s s 2 + 1 + e − 3 π 2 s s 2 + 1 \begin{aligned}
s^{2} Y(s)-s y(0)-y^{\prime}(0)+Y(s)&=e^{-\frac{\pi}{2} s}+e^{-\frac{3 \pi}{2} s} \\
\left(s^{2}+1\right) Y(s)&=e^{-\frac{\pi}{2} s}+e^{-\frac{3 \pi}{2} s} \\
Y(s)&=\frac{e^{-\frac{\pi}{2} s}}{s^{2}+1}+\frac{e^{-\frac{3 \pi}{2} s}}{s^{2}+1} \\
\end{aligned} s 2 Y ( s ) − sy ( 0 ) − y ′ ( 0 ) + Y ( s ) ( s 2 + 1 ) Y ( s ) Y ( s ) = e − 2 π s + e − 2 3 π s = e − 2 π s + e − 2 3 π s = s 2 + 1 e − 2 π s + s 2 + 1 e − 2 3 π s y ( t ) = sin ( t − π 2 ) u ( t − π 2 ) + sin ( t − 3 π 2 ) u ( t − 3 π 2 ) y ( t ) = − cos t u ( t − π 2 ) + cos t u ( t − 3 π 2 ) \begin{aligned}y(t)&=\sin \left(t-\frac{\pi}{2}\right) u\left(t-\frac{\pi}{2}\right)+\sin \left(t-\frac{3 \pi}{2}\right) u\left(t-\frac{3 \pi}{2}\right) \\
y(t)&=-\cos t u\left(t-\frac{\pi}{2}\right)+\cos t u\left(t-\frac{3 \pi}{2}\right)\end{aligned} y ( t ) y ( t ) = sin ( t − 2 π ) u ( t − 2 π ) + sin ( t − 2 3 π ) u ( t − 2 3 π ) = − cos t u ( t − 2 π ) + cos t u ( t − 2 3 π )
Use the Laplace transform to solve the given system of differential equations.
i. d x d t = − x + y , d y d t = 2 x \frac{d x}{d t}=-x+y, \frac{d y}{d t}=2 x d t d x = − x + y , d t d y = 2 x
x ( 0 ) = 0 , y ( 0 ) = 1 \quad x(0)=0, y(0)=1 x ( 0 ) = 0 , y ( 0 ) = 1
ii. d x d t + 3 x + d y d t = 1 , d x d t − x + d y d t − y = e t \frac{d x}{d t}+3 x+\frac{d y}{d t}=1, \frac{d x}{d t}-x+\frac{d y}{d t}-y=e^{t} d t d x + 3 x + d t d y = 1 , d t d x − x + d t d y − y = e t
x ( 0 ) = 0 , y ( 0 ) = 0 \quad x(0)=0, y(0)=0 x ( 0 ) = 0 , y ( 0 ) = 0
iii. d x d t − 4 x + d 3 y d t 3 = 6 sin t , d x d t + 2 x − 2 d 3 y d t 3 = 0 \frac{d x}{d t}-4 x+\frac{d^{3} y}{d t^{3}}=6 \sin t, \frac{d x}{d t}+2 x-2 \frac{d^{3} y}{d t^{3}}=0 d t d x − 4 x + d t 3 d 3 y = 6 sin t , d t d x + 2 x − 2 d t 3 d 3 y = 0
x ( 0 ) = 0 , y ( 0 ) = 0 \quad x(0)=0, y(0)=0 x ( 0 ) = 0 , y ( 0 ) = 0
y ′ ( 0 ) = 0 , y ′ ′ ( 0 ) = 0 \quad y^{\prime}(0)=0, y^{\prime \prime}(0)=0 y ′ ( 0 ) = 0 , y ′′ ( 0 ) = 0
i.
d x d t = − x + y s X − x ( 0 ) = − X + Y ( s + 1 ) X − Y = 0 (1) \begin{aligned}
\frac{d x}{d t}=-x+y \\s X-x(0)=-X+Y \\(s+1) X-Y=0 \tag{1}
\end{aligned} d t d x = − x + y s X − x ( 0 ) = − X + Y ( s + 1 ) X − Y = 0 ( 1 ) d y d t = 2 x s Y − y ( 0 ) = 2 X 2 X − s Y = 1 (2) \begin{aligned}
\frac{d y}{d t}=2 x \\s Y-y(0)=2 X \\2 X-s Y=1\tag{2}
\end{aligned} d t d y = 2 x s Y − y ( 0 ) = 2 X 2 X − s Y = 1 ( 2 ) From ( 1 ) (1) ( 1 ) Y = ( s + 1 ) X Y=(s+1) X Y = ( s + 1 ) X ( 2 ) (2) ( 2 )
2 X − s [ ( s + 1 ) X ] = 1 X ( 2 − s 2 + s ) = 1 X = 1 ( s − 1 ) ( s + 2 ) Y = s + 1 ( s − 1 ) ( s + 2 ) \begin{aligned}2 X-s[(s+1) X]&=1\\X\left(2-s^{2}+s\right)&=1 \\X&=\frac{1}{(s-1)(s+2)} \\Y&=\frac{s+1}{(s-1)(s+2)}\end{aligned} 2 X − s [( s + 1 ) X ] X ( 2 − s 2 + s ) X Y = 1 = 1 = ( s − 1 ) ( s + 2 ) 1 = ( s − 1 ) ( s + 2 ) s + 1 By partial fraction,
X = 1 3 1 s − 1 − 1 3 1 s + 2 Y = 2 3 1 s − 1 + 1 3 1 s + 2 \begin{aligned}
X=\frac{1}{3} \frac{1}{s-1}-\frac{1}{3} \frac{1}{s+2} \\ Y=\frac{2}{3} \frac{1}{s-1}+\frac{1}{3} \frac{1}{s+2}
\end{aligned} X = 3 1 s − 1 1 − 3 1 s + 2 1 Y = 3 2 s − 1 1 + 3 1 s + 2 1 Therefore,
x = 1 3 e t − 1 3 e − 2 t ; y = 2 3 e t + 1 3 e − 2 t x=\frac{1}{3} e^{t}-\frac{1}{3} e^{-2 t} \quad ;\quad y=\frac{2}{3}e^t+\frac{1}{3}e^{-2t} x = 3 1 e t − 3 1 e − 2 t ; y = 3 2 e t + 3 1 e − 2 t ii.
d x d t + 3 x + d y d t = 1 s X − x ( 0 ) + 3 X + s Y − y ( 0 ) = 1 s ( s + 3 ) X + s Y = 1 s (1) \begin{aligned}
\frac{d x}{d t}+3 x+\frac{d y}{d t}&=1\\s X-x(0)+3 X+s Y-y(0)&=\frac{1}{s}\\(s+3) X+s Y&=\frac{1}{s}\tag{1}
\end{aligned} d t d x + 3 x + d t d y s X − x ( 0 ) + 3 X + s Y − y ( 0 ) ( s + 3 ) X + s Y = 1 = s 1 = s 1 ( 1 ) d x d t − x + d y d t − y = e t s X − x ( 0 ) − X + s Y − y ( 0 ) − Y = 1 s − 1 ( s − 1 ) X + ( s − 1 ) Y = 1 s − 1 (2) \begin{aligned}
\frac{d x}{d t}-x+\frac{d y}{d t}-y&=e^{t}\\s X-x(0)-X+s Y-y(0)-Y&=\frac{1}{s-1}\\(s-1) X+(s-1) Y&=\frac{1}{s-1}\tag{2}
\end{aligned} d t d x − x + d t d y − y s X − x ( 0 ) − X + s Y − y ( 0 ) − Y ( s − 1 ) X + ( s − 1 ) Y = e t = s − 1 1 = s − 1 1 ( 2 ) [ s + 3 s s − 1 s − 1 ] [ X Y ] = [ 1 / s 1 / ( s − 1 ) ] \begin{aligned}
{\left[\begin{array}{lc}s+3 & s \\ s-1 & s-1\end{array}\right]\left[\begin{array}{l}X \\ Y\end{array}\right]=\left[\begin{array}{c}1 / s \\ 1 /(s-1)\end{array}\right] }
\end{aligned} [ s + 3 s − 1 s s − 1 ] [ X Y ] = [ 1/ s 1/ ( s − 1 ) ] Let A = [ s + 3 s s − 1 s − 1 ] , X = [ X Y ] , B = [ 1 / s 1 / ( s − 1 ) ] A=\left[\begin{array}{cc}s+3 & s \\s-1 & s-1\end{array}\right], X=\left[\begin{array}{l}X \\Y\end{array}\right], B=\left[\begin{array}{c}1 / s \\1 /(s-1)\end{array}\right] A = [ s + 3 s − 1 s s − 1 ] , X = [ X Y ] , B = [ 1/ s 1/ ( s − 1 ) ]
X = A − 1 B = 1 ( s + 3 ) ( s − 1 ) − s ( s − 1 ) [ s − 1 − s 1 − s s + 3 ] [ 1 / s 1 / ( s − 1 ) ] [ X Y ] = 1 s 2 + 2 s − 3 − s 2 + s [ s − 1 s − s s − 1 1 − s s + s + 3 s − 1 ] [ X Y ] = 1 3 ( s − 1 ) [ ( s − 1 ) 2 − s 2 s ( s − 1 ) − ( s − 1 ) 2 + s 2 + 3 s s ( s − 1 ) ] [ X Y ] = 1 3 s ( s − 1 ) 2 [ − 2 s + 1 5 s − 1 ] X = 1 − 2 s 3 s ( s − 1 ) 2 Y = 5 s − 1 3 s ( s − 1 ) 2 \begin{aligned} X&=A^{-1} B=\frac{1}{(s+3)(s-1)-s(s-1)}\left[\begin{array}{cc}s-1 & -s \\1-s & s+3\end{array}\right]\left[\begin{array}{c}1 / s \\1 /(s-1)\end{array}\right] \\ \left[\begin{array}{l}X \\Y\end{array}\right]&=\frac{1}{s^{2}+2 s-3-s^{2}+s}\left[\begin{array}{l}\frac{s-1}{s}-\frac{s}{s-1} \\\frac{1-s}{s}+\frac{s+3}{s-1}\end{array}\right] \\ \left[\begin{array}{l}X \\Y\end{array}\right]&=\frac{1}{3(s-1)}\left[\begin{array}{c}\frac{(s-1)^{2}-s^{2}}{s(s-1)} \\\frac{-(s-1)^{2}+s^{2}+3 s}{s(s-1)}\end{array}\right] \\ \left[\begin{array}{l}X \\Y\end{array}\right]&=\frac{1}{3 s(s-1)^{2}}\left[\begin{array}{c}-2 s+1 \\5 s-1\end{array}\right] \\ X&=\frac{1-2 s}{3 s(s-1)^{2}} \\ Y&=\frac{5 s-1}{3 s(s-1)^{2}}\end{aligned} X [ X Y ] [ X Y ] [ X Y ] X Y = A − 1 B = ( s + 3 ) ( s − 1 ) − s ( s − 1 ) 1 [ s − 1 1 − s − s s + 3 ] [ 1/ s 1/ ( s − 1 ) ] = s 2 + 2 s − 3 − s 2 + s 1 [ s s − 1 − s − 1 s s 1 − s + s − 1 s + 3 ] = 3 ( s − 1 ) 1 [ s ( s − 1 ) ( s − 1 ) 2 − s 2 s ( s − 1 ) − ( s − 1 ) 2 + s 2 + 3 s ] = 3 s ( s − 1 ) 2 1 [ − 2 s + 1 5 s − 1 ] = 3 s ( s − 1 ) 2 1 − 2 s = 3 s ( s − 1 ) 2 5 s − 1 By partial fraction,
X = 1 3 1 s − 1 3 1 s − 1 − 1 3 1 ( s − 1 ) 2 Y = − 1 3 1 s + 1 3 1 s − 1 + 4 3 1 ( s − 1 ) 2 \begin{aligned}
X=\frac{1}{3} \frac{1}{s}-\frac{1}{3} \frac{1}{s-1}-\frac{1}{3} \frac{1}{(s-1)^{2}}\\Y=-\frac{1}{3} \frac{1}{s}+\frac{1}{3} \frac{1}{s-1}+\frac{4}{3} \frac{1}{(s-1)^{2}}
\end{aligned} X = 3 1 s 1 − 3 1 s − 1 1 − 3 1 ( s − 1 ) 2 1 Y = − 3 1 s 1 + 3 1 s − 1 1 + 3 4 ( s − 1 ) 2 1 Therefore,
x = 1 3 − 1 3 e t − 1 3 t e t ; y = − 1 3 + 1 3 e t + 4 3 t e t x=\frac{1}{3}-\frac{1}{3} e^{t}-\frac{1}{3} t e^{t} \quad ; \quad y=-\frac{1}{3}+\frac{1}{3} e^{t}+\frac{4}{3} t e^{t} x = 3 1 − 3 1 e t − 3 1 t e t ; y = − 3 1 + 3 1 e t + 3 4 t e t iii.
d x d t − 4 x + d 3 y d t 3 = 6 sin t s L { x } − x ( 0 ) − 4 L { x } + s 3 L { y } − s 2 y ′ ′ ( 0 ) − s y ′ ( 0 ) − y ( 0 ) = 6 s 2 + 1 ( s − 4 ) L { x } + s 3 L { y } = 6 s 2 + 1 (1) \begin{aligned}
\frac{d x}{d t}-4 x+\frac{d^{3} y}{d t^{3}}&=6 \sin t\\
s \mathcal{L}\{x\}-x(0)-4 \mathcal{L}\{x\}+s^{3} \mathcal{L}\{y\}-s^{2} y^{\prime \prime}(0)-s y^{\prime}(0)-y(0)&=\frac{6}{s^{2}+1} \\
(s-4) \mathcal{L}\{x\}+s^{3} \mathcal{L}\{y\}&=\frac{6}{s^{2}+1} \tag{1}
\end{aligned} d t d x − 4 x + d t 3 d 3 y s L { x } − x ( 0 ) − 4 L { x } + s 3 L { y } − s 2 y ′′ ( 0 ) − s y ′ ( 0 ) − y ( 0 ) ( s − 4 ) L { x } + s 3 L { y } = 6 sin t = s 2 + 1 6 = s 2 + 1 6 ( 1 ) d x d t + 2 x − 2 d 3 y d t 3 = 0 s L { x } − x ( 0 ) + 2 L { x } − 2 ( s 3 L { y } − s 2 y ′ ′ ( 0 ) − s y ′ ( 0 ) − y ( 0 ) ) = 0 ( s + 2 ) L { x } − 2 s 3 L { y } = 0 (2) \begin{aligned}
\frac{d x}{d t}+2 x-2 \frac{d^{3} y}{d t^{3}}&=0 \\
s \mathcal{L}\{x\}-x(0)+2 \mathcal{L}\{x\}-2\left(s^{3} \mathcal{L}\{y\}-s^{2} y^{\prime \prime}(0)-s y^{\prime}(0)-y(0)\right)&=0 \\
(s+2) \mathcal{L}\{x\}-2 s^{3} \mathcal{L}\{y\}&=0\tag{2}
\end{aligned} d t d x + 2 x − 2 d t 3 d 3 y s L { x } − x ( 0 ) + 2 L { x } − 2 ( s 3 L { y } − s 2 y ′′ ( 0 ) − s y ′ ( 0 ) − y ( 0 ) ) ( s + 2 ) L { x } − 2 s 3 L { y } = 0 = 0 = 0 ( 2 ) [ s − 4 s 3 s + 2 − 2 s 3 ] [ L { x } L { y } ] = [ 6 / ( s 2 + 1 ) 0 ] [ L { x } L { y } ] = 1 − 2 s 4 + 8 s 3 − s 4 − 2 s 3 [ − 2 s 3 − s 3 − s − 2 s − 4 ] [ 6 / ( s 2 + 1 ) 0 ] L { x } = 4 ( s − 2 ) ( s 2 + 1 ) = 4 5 1 s − 2 − 4 5 s s 2 + 1 − 8 5 1 s 2 + 1 \begin{aligned}& \left[\begin{array}{cc}s-4 & s^{3} \\s+2 & -2 s^{3}\end{array}\right]\left[\begin{array}{c}\mathcal{L}\{x\} \\\mathcal{L}\{y\}\end{array}\right]=\left[\begin{array}{c}6 /\left(s^{2}+1\right) \\0\end{array}\right] \\
& \left[\begin{array}{l}\mathcal{L}\{x\} \\\mathcal{L}\{y\}\end{array}\right]=\frac{1}{-2 s^{4}+8 s^{3}-s^{4}-2 s^{3}}\left[\begin{array}{cc}-2 s^{3} & -s^{3} \\-s-2 & s-4\end{array}\right]\left[\begin{array}{c}6 /\left(s^{2}+1\right) \\0\end{array}\right] \\
& \mathcal{L}\{x\}=\frac{4}{(s-2)\left(s^{2}+1\right)}=\frac{4}{5} \frac{1}{s-2}-\frac{4}{5} \frac{s}{s^{2}+1}-\frac{8}{5} \frac{1}{s^{2}+1}
\end{aligned} [ s − 4 s + 2 s 3 − 2 s 3 ] [ L { x } L { y } ] = [ 6/ ( s 2 + 1 ) 0 ] [ L { x } L { y } ] = − 2 s 4 + 8 s 3 − s 4 − 2 s 3 1 [ − 2 s 3 − s − 2 − s 3 s − 4 ] [ 6/ ( s 2 + 1 ) 0 ] L { x } = ( s − 2 ) ( s 2 + 1 ) 4 = 5 4 s − 2 1 − 5 4 s 2 + 1 s − 5 8 s 2 + 1 1 Then,
x = 4 5 e 2 t − 4 5 cos t − 8 5 sin t x=\frac{4}{5} e^{2 t}-\frac{4}{5} \cos t-\frac{8}{5} \sin t x = 5 4 e 2 t − 5 4 cos t − 5 8 sin t y = 1 − 2 t − t 2 + 1 5 e 2 t − 6 5 cos t + 8 5 sin t y=1-2 t-t^{2}+\frac{1}{5} e^{2 t}-\frac{6}{5} \cos t+\frac{8}{5} \sin t y = 1 − 2 t − t 2 + 5 1 e 2 t − 5 6 cos t + 5 8 sin t
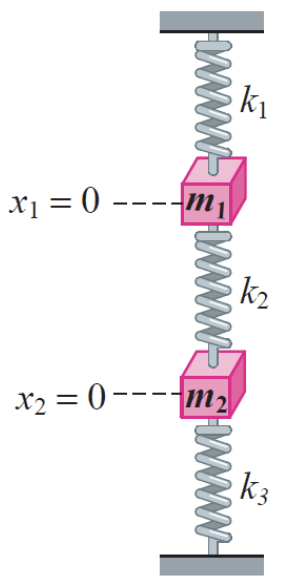
Two masses m 1 m_{1} m 1 m 2 m_{2} m 2 k 1 , k 2 k_{1}, k_{2} k 1 , k 2 k 3 k_{3} k 3
Let x 1 x_{1} x 1 x 2 x_{2} x 2 m 1 m_{1} m 1 m 2 m_{2} m 2
m 1 d 2 x 1 d t 2 = − k 1 x 1 + k 2 ( x 2 − x 1 ) m 2 d 2 x 2 d t 2 = − k 2 ( x 2 − x 1 ) − k 3 x 2 \begin{aligned}
&m_{1} \frac{d^{2} x_{1}}{d t^{2}}=-k_{1} x_{1}+k_{2}\left(x_{2}-x_{1}\right) \\
&m_{2} \frac{d^{2} x_{2}}{d t^{2}}=-k_{2}\left(x_{2}-x_{1}\right)-k_{3} x_{2}
\end{aligned} m 1 d t 2 d 2 x 1 = − k 1 x 1 + k 2 ( x 2 − x 1 ) m 2 d t 2 d 2 x 2 = − k 2 ( x 2 − x 1 ) − k 3 x 2 Using Laplace transform to solve the system when k 1 = 1 , k 2 = 1 , k 3 = 1 , m 1 = 1 , m 2 = 1 k_{1}=1, k_{2}=1, k_{3}=1, m_{1}=1, m_{2}=1 k 1 = 1 , k 2 = 1 , k 3 = 1 , m 1 = 1 , m 2 = 1 x 1 ( 0 ) = 0 , x 1 ′ ( 0 ) = − 1 , x 2 ( 0 ) = 0 , x 2 ′ ( 0 ) = 1 x_{1}(0)=0, x_{1}^{\prime}(0)=-1, x_{2}(0)=0, x_{2}^{\prime}(0)=1 x 1 ( 0 ) = 0 , x 1 ′ ( 0 ) = − 1 , x 2 ( 0 ) = 0 , x 2 ′ ( 0 ) = 1
For m 1 d 2 x 1 d t 2 = − k 1 x 1 + k 2 ( x 2 − x 1 ) m_{1} \frac{d^{2} x_{1}}{d t^{2}}=-k_{1} x_{1}+k_{2}\left(x_{2}-x_{1}\right) m 1 d t 2 d 2 x 1 = − k 1 x 1 + k 2 ( x 2 − x 1 )
Substitute unknowns:
d 2 x 1 d t 2 = − x 1 + ( x 2 − x 1 ) = − 2 x 1 + x 2 \frac{d^{2} x_{1}}{d t^{2}}=-x_{1}+\left(x_{2}-x_{1}\right)=-2 x_{1}+x_{2} d t 2 d 2 x 1 = − x 1 + ( x 2 − x 1 ) = − 2 x 1 + x 2 Laplace transform:
s 2 X 1 ( s ) − s x 1 ( 0 ) − x 1 ′ ( 0 ) = − 2 X 1 ( s ) + X 2 ( s ) (1) s^{2} X_{1}(s)-s x_{1}(0)-x_{1}^{\prime}(0)=-2 X_{1}(s)+X_{2}(s) \tag{1} s 2 X 1 ( s ) − s x 1 ( 0 ) − x 1 ′ ( 0 ) = − 2 X 1 ( s ) + X 2 ( s ) ( 1 ) For m 2 d 2 x 2 d t 2 = − k 2 ( x 2 − x 1 ) − k 3 x 2 m_{2} \frac{d^{2} x_{2}}{d t^{2}}=-k_{2}\left(x_{2}-x_{1}\right)-k_{3} x_{2} m 2 d t 2 d 2 x 2 = − k 2 ( x 2 − x 1 ) − k 3 x 2
Substitute unknowns:
d 2 x 2 d t 2 = − ( x 2 − x 1 ) − x 2 = x 1 − 2 x 2 \frac{d^{2} x_{2}}{d t^{2}}=-\left(x_{2}-x_{1}\right)-x_{2}=x_{1}-2 x_{2} d t 2 d 2 x 2 = − ( x 2 − x 1 ) − x 2 = x 1 − 2 x 2 Laplace transform:
s 2 X 2 ( s ) − s x 2 ( 0 ) − x 2 ′ ( 0 ) = X 1 ( s ) − 2 X 2 ( s ) (2) s^{2} X_{2}(s)-s x_{2}(0)-x_{2}^{\prime}(0)=X_{1}(s)-2 X_{2}(s)\tag{2} s 2 X 2 ( s ) − s x 2 ( 0 ) − x 2 ′ ( 0 ) = X 1 ( s ) − 2 X 2 ( s ) ( 2 ) Hence,
− X 1 ( s ) + ( s 2 + 2 ) X 2 ( s ) = 1 (3) -X_{1}(s)+\left(s^{2}+2\right) X_{2}(s)=1 \tag{3} − X 1 ( s ) + ( s 2 + 2 ) X 2 ( s ) = 1 ( 3 ) From ( 1 ) (1) ( 1 )
X 2 ( s ) = ( s 2 + 2 ) X 1 ( s ) + 1 (4) X_{2}(s)=\left(s^{2}+2\right) X_{1}(s)+1\tag{4} X 2 ( s ) = ( s 2 + 2 ) X 1 ( s ) + 1 ( 4 ) Substitute ( 4 ) (4) ( 4 ) ( 3 ) (3) ( 3 )
− X 1 ( s ) + ( s 2 + 2 ) [ ( s 2 + 2 ) X 1 ( s ) + 1 ] = 1 ( − 1 + s 4 + 4 s 2 + 4 ) X 1 ( s ) + s 2 + 2 = 1 X 1 ( s ) = − s 2 + 1 ( s 2 + 1 ) ( s 2 + 3 ) = − 1 s 2 + 3 \begin{aligned}-X_{1}(s)+\left(s^{2}+2\right)\left[\left(s^{2}+2\right) X_{1}(s)+1\right]&=1\\\left(-1+s^{4}+4 s^{2}+4\right) X_{1}(s)+s^{2}+2&=1 \\ X_{1}(s)=-\frac{s^{2}+1}{\left(s^{2}+1\right)\left(s^{2}+3\right)}&=-\frac{1}{s^{2}+3}\end{aligned} − X 1 ( s ) + ( s 2 + 2 ) [ ( s 2 + 2 ) X 1 ( s ) + 1 ] ( − 1 + s 4 + 4 s 2 + 4 ) X 1 ( s ) + s 2 + 2 X 1 ( s ) = − ( s 2 + 1 ) ( s 2 + 3 ) s 2 + 1 = 1 = 1 = − s 2 + 3 1 Substitute X 1 ( s ) X_{1}(s) X 1 ( s ) ( 4 ) (4) ( 4 )
X 2 ( s ) = ( s 2 + 2 ) [ − 1 s 2 + 3 ] + 1 X 2 ( s ) = − s 2 − 2 + s 2 + 3 s 2 + 3 = 1 s 2 + 3 \begin{aligned}X_{2}(s)&=\left(s^{2}+2\right)\left[-\frac{1}{s^{2}+3}\right]+1\\X_{2}(s)&=\frac{-s^{2}-2+s^{2}+3}{s^{2}+3}=\frac{1}{s^{2}+3}\end{aligned} X 2 ( s ) X 2 ( s ) = ( s 2 + 2 ) [ − s 2 + 3 1 ] + 1 = s 2 + 3 − s 2 − 2 + s 2 + 3 = s 2 + 3 1 Inverse Laplace,
x 1 ( t ) = − 1 3 sin 3 t ; x 2 ( t ) = 1 3 sin 3 t x_{1}(t)=-\frac{1}{\sqrt{3}} \sin \sqrt{3} t;\quad x_{2}(t)=\frac{1}{\sqrt{3}} \sin \sqrt{3} t x 1 ( t ) = − 3 1 �� sin 3 t ; x 2 ( t ) = 3 1 sin 3 t
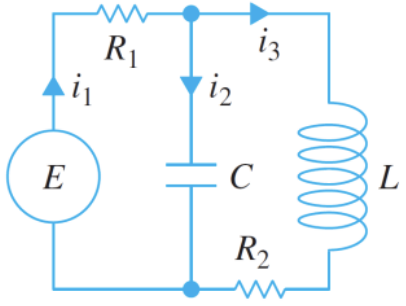
The system of differential equations for the charge on the capacitor q ( t ) q(t) q ( t ) i 3 ( t ) i_{3}(t) i 3 ( t )
Find the charge on the capacitor q ( t ) q(t) q ( t ) L = 1 H , R 1 = 1 Ω , R 2 = 1 Ω , C = 1 F , E ( t ) = { 0 , 0 < t < 1 50 e − t , t ≥ 1 , i 3 ( 0 ) = 0 , q ( 0 ) = 0 L=1 H, R_{1}=1 \Omega, R_{2}=1 \Omega, C=1 F, E(t)=\left\{\begin{array}{l}0,0<t<1 \\ 50 e^{-t}, t \geq 1\end{array}, i_{3}(0)=0, q(0)=0 \right. L = 1 H , R 1 = 1Ω , R 2 = 1Ω , C = 1 F , E ( t ) = { 0 , 0 < t < 1 50 e − t , t ≥ 1 , i 3 ( 0 ) = 0 , q ( 0 ) = 0
d q d t + q + i 3 = 50 e − t u ( t − 1 ) d q d t + q + i 3 = 50 e − ( t − 1 ) − 1 u ( t − 1 ) \begin{aligned}\frac{d q}{d t}+q+i_{3}&=50 e^{-t} u(t-1)\\\frac{d q}{d t}+q+i_{3}&=50 e^{-(t-1)-1} u(t-1)\end{aligned} d t d q + q + i 3 d t d q + q + i 3 = 50 e − t u ( t − 1 ) = 50 e − ( t − 1 ) − 1 u ( t − 1 ) s Q ( s ) − q ( 0 ) + Q ( s ) + I 3 ( s ) = 50 e − 1 s + 1 e − s ( s + 1 ) Q ( s ) + I 3 ( s ) = 50 e − 1 s + 1 e − s (1) \begin{aligned}
s Q(s)-q(0)+Q(s)+I_{3}(s)=\frac{50 e^{-1}}{s+1} e^{-s}\\
(s+1) Q(s)+I_{3}(s)=\frac{50 e^{-1}}{s+1} e^{-s}\tag{1}
\end{aligned} s Q ( s ) − q ( 0 ) + Q ( s ) + I 3 ( s ) = s + 1 50 e − 1 e − s ( s + 1 ) Q ( s ) + I 3 ( s ) = s + 1 50 e − 1 e − s ( 1 ) d i 3 d t + i 3 − q = 0 s I 3 ( s ) − i 3 ( 0 ) + I 3 ( s ) − Q ( s ) = 0 − Q ( s ) + ( s + 1 ) I 3 ( s ) = 0 (2) \begin{aligned}
\frac{d i_{3}}{d t}+i_{3}-q=0\\
s I_{3}(s)-i_{3}(0)+I_{3}(s)-Q(s)=0\\
-Q(s)+(s+1) I_{3}(s)=0\tag{2}
\end{aligned} d t d i 3 + i 3 − q = 0 s I 3 ( s ) − i 3 ( 0 ) + I 3 ( s ) − Q ( s ) = 0 − Q ( s ) + ( s + 1 ) I 3 ( s ) = 0 ( 2 ) Solving ( 1 ) (1) ( 1 ) ( 2 ) (2) ( 2 )
Q ( s ) = 50 e − ( s + 1 ) ( s + 1 ) 2 + 1 q ( t ) = 50 e − 1 e − ( t − 1 ) sin ( t − 1 ) u ( t − 1 ) = 50 e − t sin ( t − 1 ) u ( t − 1 ) \begin{aligned}
Q(s)&=\frac{50 e^{-(s+1)}}{(s+1)^{2}+1}\\q(t)&=50 e^{-1} e^{-(t-1)} \sin (t-1) u(t-1)\\
&=50 e^{-t} \sin (t-1) u(t-1)
\end{aligned} Q ( s ) q ( t ) = ( s + 1 ) 2 + 1 50 e − ( s + 1 ) = 50 e − 1 e − ( t − 1 ) sin ( t − 1 ) u ( t − 1 ) = 50 e − t sin ( t − 1 ) u ( t − 1 )